
Trabajar perfectamente en equipo con un compañero no humano ya no es una quimera.
La colaboración entre trabajadores humanos y robots es uno de los avances más innovadores asociados a la digitalización y la Industria 4.0. Se han realizado progresos muy importantes en cosas que hace tan solo unos años parecían de ciencia ficción. Pero al mismo tiempo, este atisbo de cómo podría ser el trabajo en el futuro suscita una serie de preguntas. ¿Cómo funciona exactamente la coordinación entre humanos y robots? ¿Y son compatibles la Industria 4.0 y la ergonomía? Henning Petruck, ayudante de investigación del Instituto de Ingeniería Industrial y Ergonomía (IAW) de la Universidad de Aachen (RWTH), está especializado en la colaboración humano-robot: una forma de que humanos y robots trabajen mano a mano sin barreras que los separen. Posgraduado del clúster de excelencia en “Internet de la Producción”, financiado por la Fundación Alemana de Investigación (DFG), Petruck utiliza un puesto de trabajo especialmente diseñado utilizando el sistema de bancos de trabajo de item para investigar cómo pueden los robots facilitar las cosas al personal de montaje.
Trabajar con flexibilidad y ergonomía
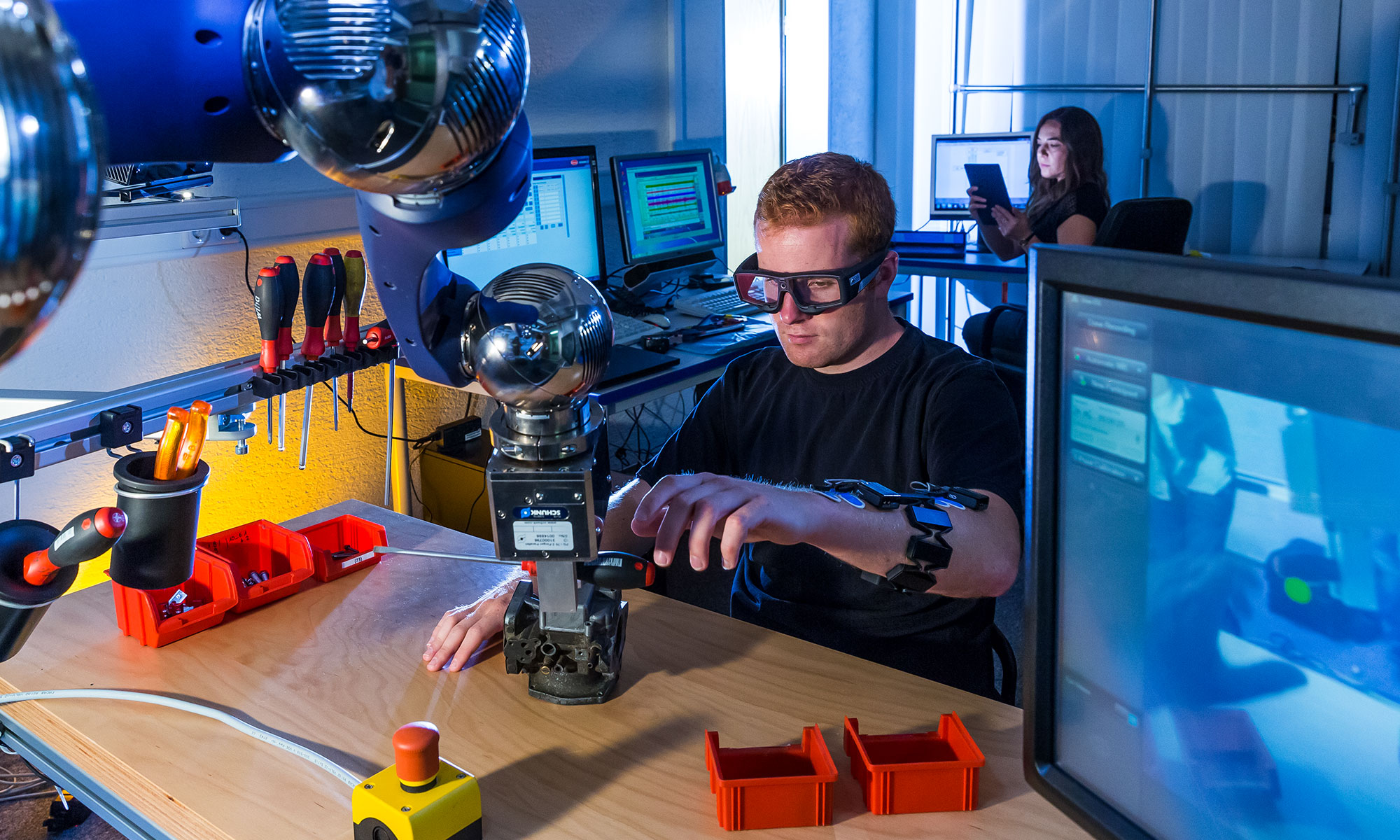
La idea básica del Puesto Colaborativo para el Montaje (CoWorkAs) es que un brazo robótico pase componentes y herramientas al trabajador, por lo que se trata de una auténtica colaboración humano-robot centrada en el contacto físico con un robot. “El trabajador puede centrarse por completo en los aspectos de valor añadido de la producción. Ya no es necesario andar buscando todas las piezas necesarias. Solo hace falta montarlas”, explica Petruck. Esto es posible gracias a una estructura de cuatro columnas que vincula un banco de trabajo ajustable en altura con el sistema de suministro y recogida de materiales. El brazo robótico está conectado a dos ejes lineales aéreos.
Nos gustó mucho la flexibilidad, modularidad y altura ajustable del concepto de item.
Con la excepción de este brazo, todo el puesto de trabajo está hecho de soluciones item, incluso elementos adicionales como los soportes para herramientas y para el monitor. No hace falta decir que la ergonomía ha sido un criterio esencial en la elección de proveedor por parte de la dirección del proyecto. “Tras una conversación con item en una feria comercial, la empresa diseñó un concepto para nosotros. Nos gustó mucho su flexibilidad, modularidad y altura ajustable”, señala Petruck. Todo el puesto de trabajo está interconectado y es totalmente ajustable al tamaño de la persona que lo utiliza. Más aún, gracias a su diseño modular, se puede ampliar constantemente.

Colaboración humano-robot en perfecta sincronía
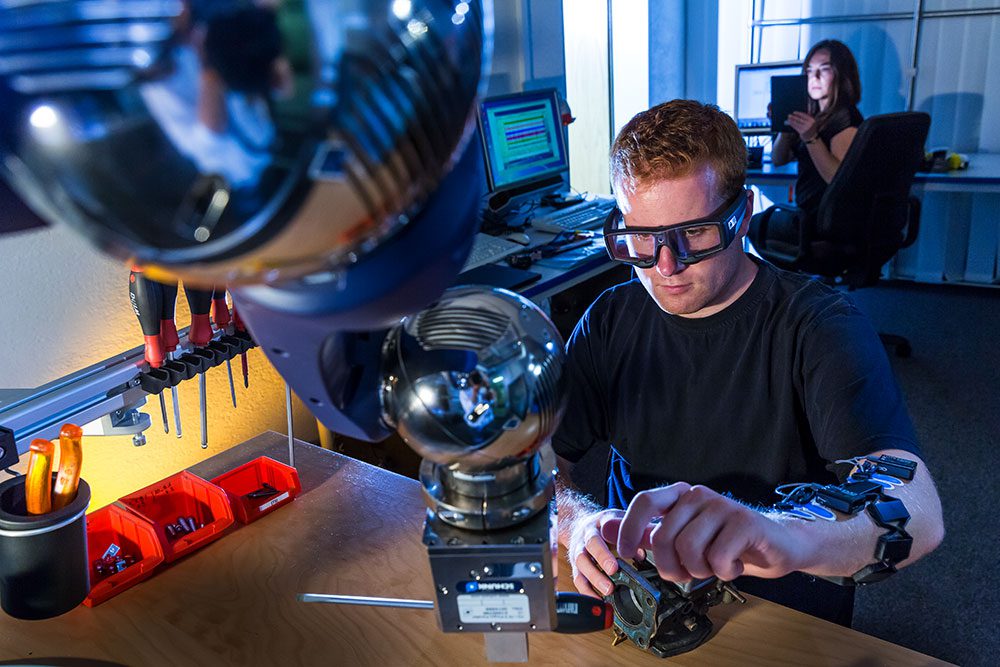
El brazo robótico recoge el objeto y avanza hacia el trabajador. Cuanto más se acerca, más lentamente se mueve para evitar colisiones accidentales. El robot se detiene justo antes de alcanzar a su compañero humano. Esto también es importante para que los trabajadores se sientan cómodos, que puedan alargar el brazo para agarrar el objeto y que no se lo echen encima. “Trabajar con un robot es una experiencia totalmente nueva, especialmente cuando no está sujeto y tiene una amplia autonomía de movimiento, como ocurre en nuestra instalación. Puede ser un tanto desconcertante y hay que tener en cuenta estos factores”, subraya Petruck.
El algoritmo puede calcular exactamente cuándo necesitará el trabajador el próximo componente.
Cualquier colaboración humano-robot presenta un importante desafío técnico: cómo predecir con precisión el comportamiento humano. En el caso de CoWorkAs, se utiliza la detección de actividad durante el proceso de montaje para analizar el tiempo que tardan los trabajadores en completar las etapas de montaje. Una vez el sistema ha observado el primer ciclo de trabajo, un algoritmo calcula la diferencia entre el tiempo previsto y el tiempo empleado. “Esta diferencia puede utilizarse para predecir con exactitud la duración de la siguiente etapa de montaje, que permite determinar que el brazo robótico podrá entregar el componente en el tiempo adecuado”, explica Petruck. Entregarlo demasiado pronto causaría al trabajador un estrés innecesario y el robot no estaría disponible para otras tareas.

Protección de datos y estudios adicionales
Cualquier temor en relación con la protección de datos es infundado porque con este tipo de colaboración humano-robot no es necesario guardar perfiles de usuario. El algoritmo solo necesita unos pocos datos para adaptarse al usuario actual. Basta con un ciclo de trabajo. Más aún, en próximas investigaciones se estudiará el control humano del brazo robótico. Esto tiene que ver con el trabajo realizado por otro miembro del equipo de investigación de la universidad que ha desarrollado un sistema de control para parapléjicos que solo pueden mover la cabeza. Gracias a un acelerómetro montado en la cabeza, son capaces de controlar un robot únicamente con movimientos de cabeza. CoWorkAs llevará estos experimentos al próximo nivel.
Para más información, lea el informe titulado “Colaboración humano-robot en el montaje manual: un puesto de trabajo colaborativo”, en el que también han participado tres expertos en ergonomía de item. La Profesora Verena Nitsch, Directora del Instituto de Ingeniería Industrial y Ergonomía de la Universidad RWTH de Aachen, y Henning Petruck también estarán encantados de resolver cualquier duda.