Cómo la robótica más avanzada es capaz de ofrecer nuevas oportunidades a la humanidad.
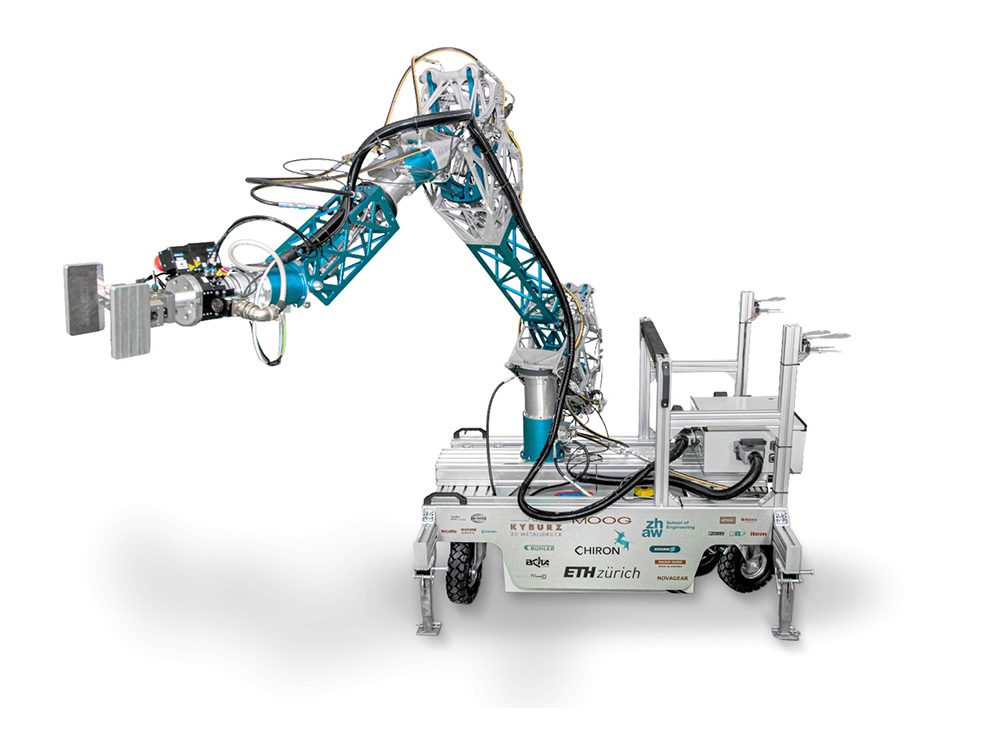
Los robots ya son habituales en muchos sectores; la industria del automóvil es un buen ejemplo de ello. Sin embargo, este no es aún el caso en la construcción, a pesar de ser una industria que podría beneficiarse en gran medida del personal robótico, que reduciría el alto riesgo de accidentes laborales en las obras de la construcción. De acuerdo con la asociación alemana dedicada al aseguramiento legal y la prevención de accidentes en la industria de la construcción (BG BAU), se registraron un total de 88 muertes en 2018, solo en Alemania. El equipo de estudiantes de la ETH Zurich y la ZHAW Zurich University of Applied Sciences que está detrás del robot de obra autónomo CHIRON están deseosos de abordar los peligros subyacentes. El nombre del equipo no es ninguna casualidad. Chiron es un personaje de la mitología griega: un híbrido mitad caballo, mitad hombre. El CHIRON moderno, formado por dos partes, consiste en un brazo hidráulico robótico con seis grados de articulación montado sobre un chasis móvil basado en el Sistema de Construcción Modular MB de item. Su innovadora tecnología lo convierte también en un destacado aspirante para futuras misiones en el espacio exterior.

Destacando unidos como equipo
El equipo CHIRON, compuesto de 13 miembros, lo forman ocho ingenieros mecánicos, dos ingenieros eléctricos y tres estudiantes de ingeniería de sistemas. Mientras que los alumnos de la ZHAW se involucran en esta misión como parte de sus proyectos de licenciatura, para los miembros del equipo que vienen de la ETH, CHIRON es un «proyecto enfocado», un trabajo que se realiza durante el último año del programa de licenciatura en el que los alumnos ponen en práctica los conocimientos teóricos que han adquirido durante todo el curso. No obstante, en último término también escribirán acerca del robot de obra en sus tesis. El primer paso, por supuesto, es siempre el más difícil: «Las primeras semanas fueron un verdadero reto. Estábamos haciendo algo completamente nuevo, así que no teníamos realmente a nadie que nos explicara lo que teníamos que hacer», dice Peter Zhang. Estudia ingeniería mecánica y formó parte del grupo que diseñó el brazo del robot, que es capaz de levantar dinámicamente cargas de 30 kg y pesa únicamente 74 kg. Los brazos robóticos similares suelen pesar entre cuatro y cinco veces más.
La ETH utiliza la tecnología de perfiles de item muy a menudo. Todo es extensible de un modo muy simple y eso supone una enorme ventaja.
Es posible adaptar varias herramientas al robot y para ello solo se requiere modificar el software. Por ejemplo, dos miembros del equipo ya han desarrollado una herramienta para pulverizar revoques, que incluye una bomba y una aplicación especial, de manera que el robot es capaz de desplazarse y distribuir el revoque a lo largo de toda una pared. Por limitaciones de tiempo, el equipo decidió no implementar la motorización que habían planeado en un principio y optó en su lugar por una solución modular con cuatro ruedas. «La ETH utiliza la tecnología de perfiles de item muy a menudo, así que no tardamos en ponernos en contacto con item. Su tecnología nos permite reaccionar con rapidez y flexibilidad. Todo es extensible de un modo muy simple y esto lo apreciamos en el proyecto desde el primer momento. Eso supone una enorme ventaja», señala Peter. El equipo también añadió una carcasa protectora de item que ofrece protección frente a las herramientas incorporadas al robot, tales como sierras de cadena, y que al mismo tiempo evita que cualquier elemento sobresalga o escape si la hidráulica del brazo robótico se emplea de manera inadecuada.
Los robots de obra son también un activo valioso en la luna
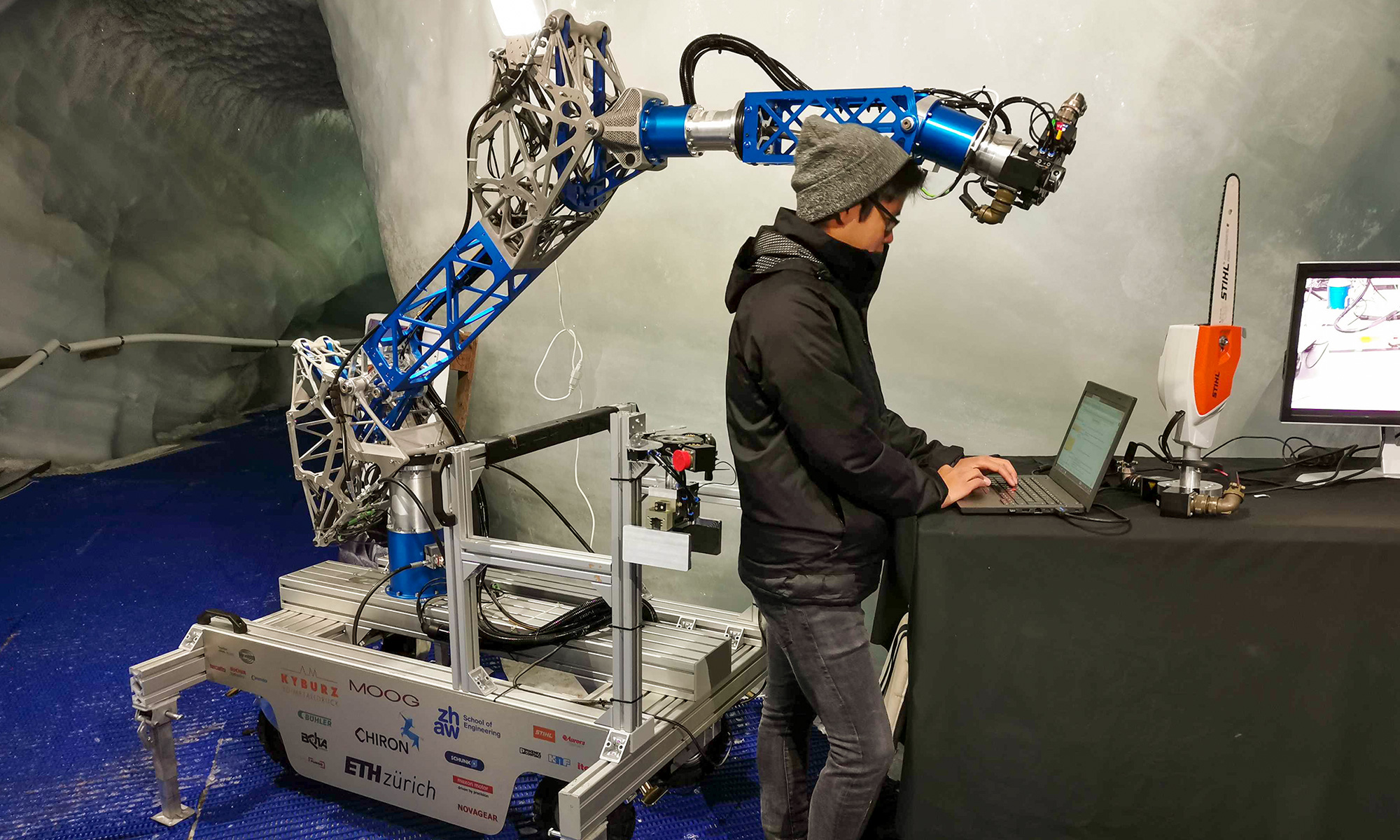
Con todo, la utilidad de este robot no se limita, en absoluto, a las obras de la construcción. Durante su asistencia a un evento espectacular, el equipo pudo demostrar lo que el futuro podría tener reservado para CHIRON. Del 17 de junio al 3 de julio de 2019, tuvo lugar el proyecto IGLUNA en el palacio glaciar del Matterhorn glacier paradise en Zermatt, donde 20 equipos de estudiantes procedentes de nueve países europeos se reunieron invitados por el Swiss Space Center y la Agencia Espacial Europea (ESA). Todos ellos llegaron acompañados de sus innovadoras invenciones con el objeto de investigar cómo hacer posible la vida humana en la luna. Algo que parecería ciencia ficción hace unos pocos años ya no parece tan inverosímil a la luz del impacto cada vez más palpable de la destrucción medioambiental.
El objetivo de nuestro proyecto era demostrar que se puede enviar un robot a la luna para que construya una estructura que posibilite el establecimiento de viviendas seguras.
Destacando en su imponente atura de 3.883 metros y con un grosor de 15 metros bajo su superficie, el glaciar presenta unas condiciones extremas que son similares a las que existen en la superficie de la luna. Allí la temperatura es de unos constantes -4 grados Celsius. Así es que se necesita un auténtico espíritu inventivo para sacar el mayor partido posible de estas condiciones tan inhóspitas. El espectro de aplicaciones presentadas abarca desde diseños arquitectónicos para un hábitat lunar o ideas para la producción eficiente de alimentos hasta la inteligencia artificial adaptada las preferencias del astronauta. CHIRON, que fue equipado con una sierra de cadena para la ocasión, pudo exhibir al máximo sus capacidades durante el evento. «El objetivo de nuestro proyecto era demostrar que se puede enviar un robot a la luna para que construya una estructura que posibilite el establecimiento de viviendas seguras. En concreto, esto requería que CHIRON utilizara la sierra de cadena para cortar bloques de hielo y los dispusiera para formar paredes de hielo», explica Peter.
Dando pasos de gigante con CHIRON
En el momento presente, CHIRON no es aún un robot autónomo. Es operado por personas mediante una interfaz de PC que ofrece dos opciones: controlar las articulaciones individuales para mover el brazo robótico y determinar una trayectoria que el robot ha de seguir. En este último caso, calcula de forma independiente los movimientos de sus articulaciones, como ocurre en el proceso de revocado por pulverización mencionado anteriormente. De todos modos, existen planes concretos para convertir a CHIRON en un robot de obra autónomo. Por ejemplo, el equipo está actualmente trabajando en un software que capacitará al robot para detectar y recoger piedras y montar con ellas una estructura, todo ello sin intervención humana. En cuanto a su futuro profesional, CHIRON ha supuesto un verdadero golpe de suerte para estos estudiantes: «Aquí podemos aplicar a gran escala una gran parte de lo que hemos aprendido en nuestros estudios. Y la experiencia práctica vale más que el oro», dice Peter.