
Idealna współpracy z kolegą-robotem nie jest już marzeniem o dalekiej przyszłości.
Do najnowszych osiągnięć związanych z cyfryzacją i czwartą rewolucją przemysłową należy współpraca pracowników produkcyjnych z robotami. To, co jeszcze kilka lat temu przypominało film science-fiction, dzisiaj jest szybko rozwijającym się obszarem nauki. Przyszłość w zasięgu ręki wiąże się z szeregiem pytań dotyczących idei pracy: W jaki sposób człowiek i maszyna są do siebie dopasowywane? Na ile można połączyć ze sobą cele i założenia przemysłu 4.0 i ergonomii? Henning Petruck jest pracownikiem naukowym Instytutu Nauki o Pracy (IAW) przy uniwersytecie technicznym w Akwizgranie (RWTH) i specjalizuje się we współpracy człowiek-maszyna. Mowa tutaj o pracy, którą człowiek i robot wykonują wspólnie, bez żadnych osłon ani barierek ochronnych. W oparciu o specjalnie zaprojektowane stanowisko oparte na systemie stanowisk pracy item Henning Petruck, doktorant klastra doskonałości Niemieckiej Wspólnoty Badawczej (DFG) „Internet of Production”, bada, w jaki sposób roboty mogą odciążyć operatorów.
Ergonomiczna i elastyczna praca
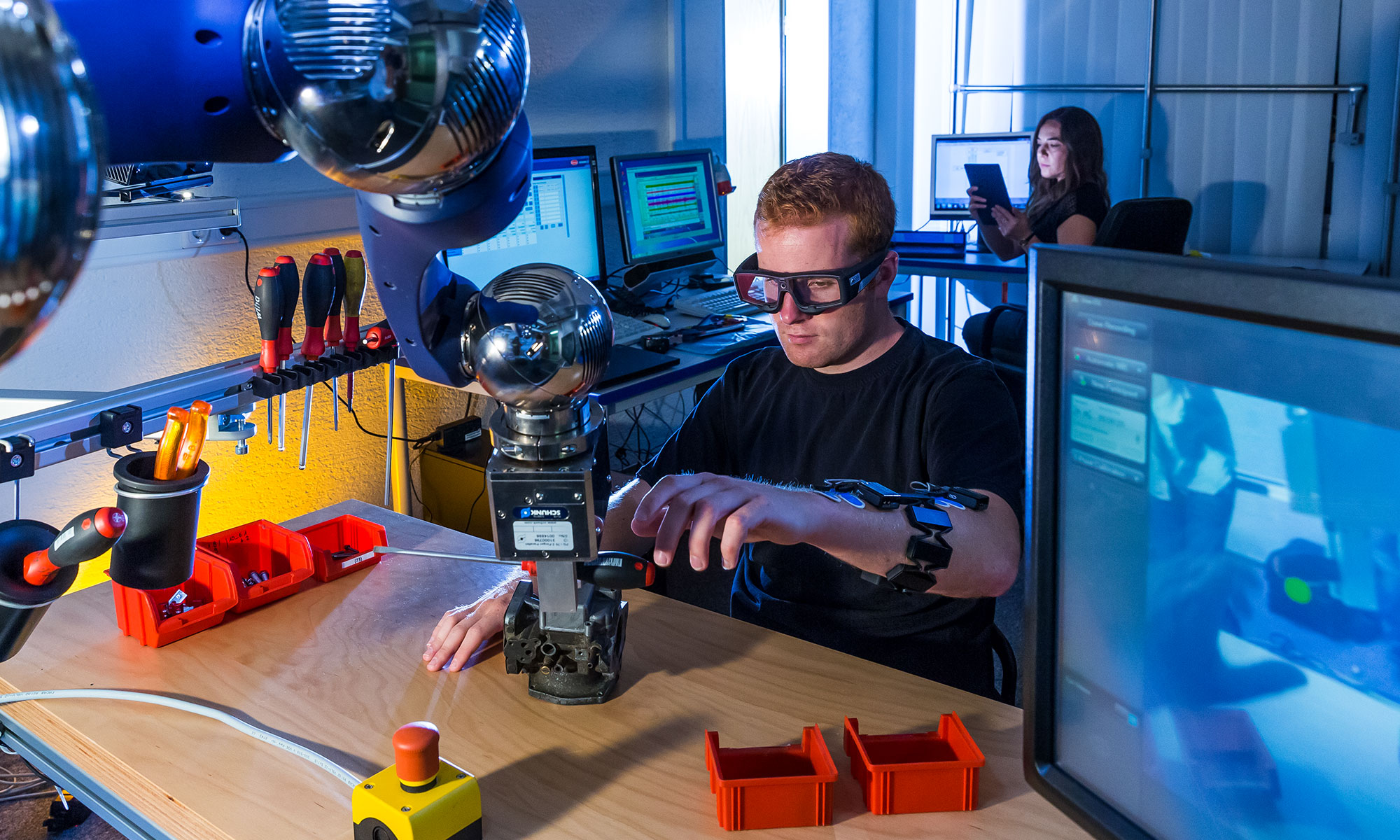
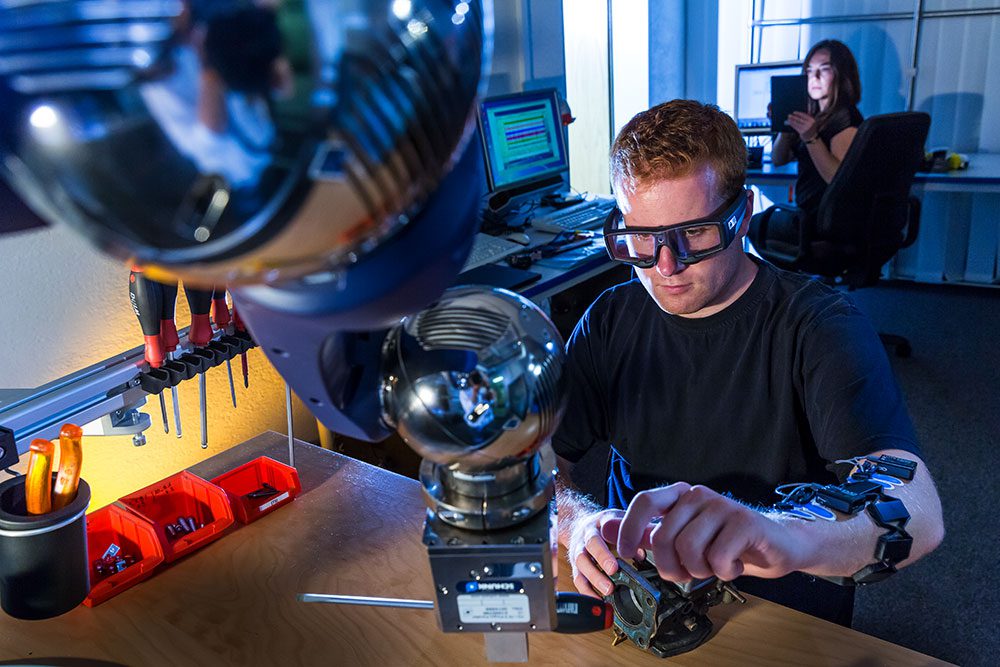
Idea montażowych stanowisk pracy „Collaborative Workplace for Assembly“ (CoWorkAs) polega na tym, że ramię robota podaje monterowi części i narzędzia. Jest to zatem idealny przykład na współpracę między człowiekiem a maszyną, która polega na fizycznym kontakcie. „Monter może się w pełni skoncentrować na tych obszarach produkcji, które tworzą wartość dodaną. Nie musi szukać części, musi je jedynie złożyć”, wyjaśnia Henning Petruck. Takie rozwiązanie możliwe jest dzięki poniższej konstrukcji: Na ramie składającej się z czterech kolumn zamontowany jest stół roboczy regulowany na wysokość, który połączony jest z systemem dostarczania materiału. Nad tym układem znajdują się dwie osie liniowe – one natomiast połączone są z ramieniem robota.
Projekt item spodobał nam się ze względu na takie parametry i właściwości, jak regulacja wysokości, wszechstronność i modułowość.
Z wyjątkiem tego ramienia wszystkie komponenty systemu składają się z produktów item. Należą do nich także akcesoria, np. uchwyty na narzędzia i monitory. Kierownicy projektu kierowali się przy wyborze zleceniobiorcy przede wszystkim ergonomią oferowanych rozwiązań. „Podczas targów podeszliśmy do przedstawicieli item z pytaniem, a następnie oni opracowali dla nas projekt. Spodobał nam się ze względu na takie parametry i właściwości, jak regulacja wysokości, wszechstronność i modułowość”, opowiada Henning Petruck. Całe stanowisko pracy tworzy jedną całość i można go w pełni dopasować do warunków fizycznych danego pracownika. Ponadto dzięki modułowej budowie można je w każdej chwili rozbudować.

Współpraca człowiek-maszyna i idealny timing
Ramię robota pobiera materiał i przesuwa się w kierunku pracownika. Im bliżej niego jest, tym wolniej się porusza, aby zapobiec przypadkowym kolizjom. Zatrzymuje się dopiero bezpośrednio przed swoim ludzkim kolegą. Takie rozwiązanie ma istotne znaczenie dla komfortu człowieka. To on wykonuje ruch do przodu, pobierając część a nie robot. „Dla pracownika produkcyjnego współpraca z robotem jest zupełnie nową sytuacją. Szczególnie wtedy, gdy robot – tak jak u nas – ma bardzo duży zakres ruchu i nie jest zabudowany. To może być źródłem niepewności. Takie czynniki trzeba również brać pod uwagę,” podkreśla Petruck.
Algorytm potrafi dokładnie obliczyć, kiedy operator będzie potrzebował kolejnej części.
Przed każdą współpracą między człowiekiem a maszyną pojawia się ważne techniczne wyzwanie: W jaki sposób można dokładnie przewidzieć ludzkie zachowanie? W przypadku montażowych stanowisk pracy typu CoWorkAs czas wykonywania czynności przez pracownika podczas montażu mierzony jest przez czujniki ruchu. Kiedy pracownik skończy montaż? Po obserwacji pierwszego cyklu pracy w oparciu o algorytm obliczana jest różnica między zaplanowanym a rzeczywistym czasem trwania danej czynności. „Na podstawie tej różnicy można precyzyjnie określić czas trwania kolejnego etapu montażowego. Ta informacja to podstawa do tego, aby ramię robota w odpowiednim momencie podało część”, wyjaśnia Henning Petruck. Jeśli część zostałaby podana za wcześnie, pracownik mógłby się zestresować, a robot nie mógłby wykonywać innych czynności.

Ochrona danych i nie tylko
Ewentualne wątpliwości dotyczące ochrony danych odnośnie do tej formy współpracy między człowiekiem a maszyną są nieuzasadnione: Nie ma potrzeby korzystania z zapisanych profili użytkowników. Algorytm potrzebuje jedynie małej liczby danych, aby dopasować się do użytkownika. Jeden przebieg wystarczy w zupełności. W bliskiej przyszłości będą prowadzone prace naukowe na temat kontrolowania ramienia robota przez człowieka. Te badania będą bazowały na pracy jednego z kolegów z uniwersytetu technicznego RWTH w Akwizgranie, który opracował układ sterowania dla osób sparaliżowanych mogących ruszać tylko głową. Za pomocą czujnika przyspieszenia umieszczonego na głowie osoby te mogą poruszać głową robota. Badania te mają być kontynuowane na stanowiskach pracy typu CoWorkAs.
Więcej informacji znajdziesz w tekście pt. „Human-Robot Collaboration in Manual Assembly – A Collaborative Workplace“, opracowanym m.in. przez trzech specjalistów item w zakresie ergonomii. W razie pytań można zwrócić się również do pani prof. Vereny Nitsch, kierowniczki Instytutu ds. Nauki o pracy przy uniwersytecie technicznym RWTH w Akwizgranie, oraz Henninga Petrucka.