

Les tremblements de terre posent de sérieux problèmes aux sauveteurs lorsqu’il s’agit de retrouver des survivants.
Normalement, ils essaient d’abord à l’aide de chiens de déterminer par exemple dans quelles parties d’un bâtiment effondré se trouvent des personnes ensevelies. Ensuite, la prise de contact s’effectue en tapant contre les parois. Cependant, cette approche ne permet pas d’atteindre les victimes inconscientes. Pour un examen plus précis des décombres on utilise un bras télescopique qui est équipé d’une caméra ainsi que d’un microphone et d’un haut-parleur pour la prise de contact. Malgré une possibilité de rotation, un tel bras n’est pas assez flexible pour examiner correctement les parties effondrées. En même temps, cette opération implique un risque non négligeable pour les équipes de sauvetage qui ne savent pas à quoi s’attendre. Un projet des étudiants de l’école polytechnique fédérale ETH Zurich vise donc à assister les secouristes par un robot de recherche et de sauvetage spécialement développé. Grâce à une technique de déplacement spécifique, il s’approche doucement à la manière d’un serpent – d’où le nom « RoBoa ». Pour le boîtier stationnaire qui contient des éléments importants pour le fonctionnement du robot sismique l’équipe du RoBoa fait appel à la technique des profilés du système de construction modulaire MB d’item.

Une idée – des possibilités sans limite
Flexibilité, robustesse et qualité supérieure : depuis plus de 40 ans, le Système de construction modulaire MB item est la solution pour relever tous les défis dans le domaine de la construction de machines et des équipements de production.
DEMANDER LE LOT D’ECHANTILLONS
Une technique innovante pour avancer en toute sécurité dans une zone sismique
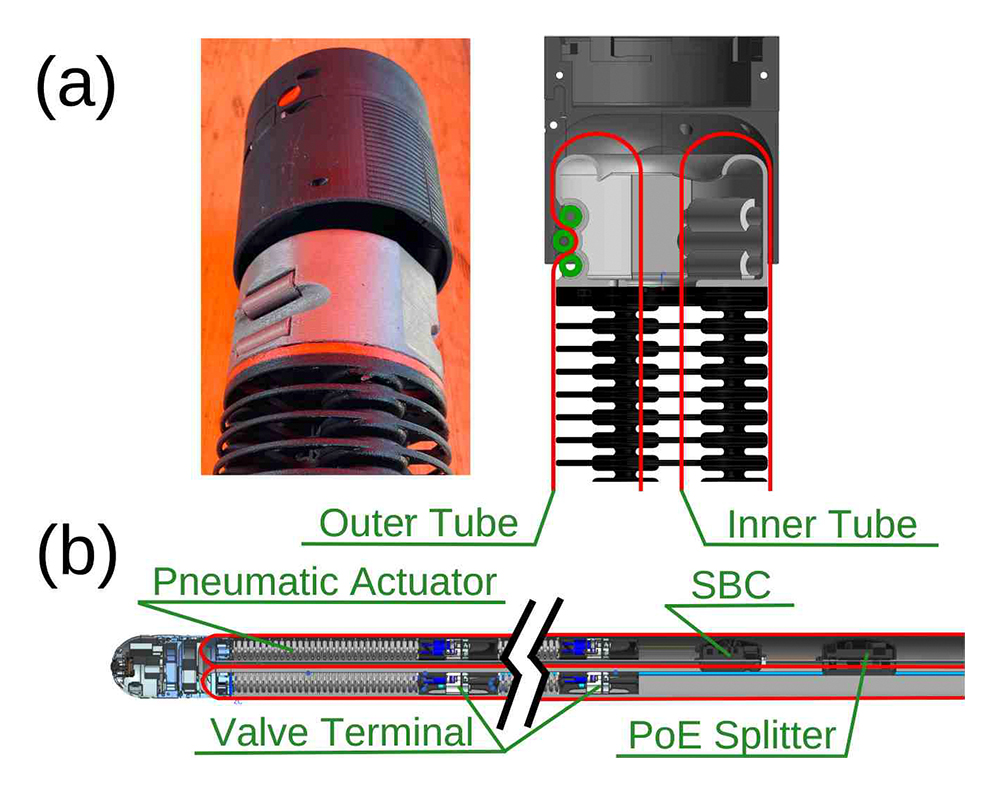
Le RoBoa fut crée dans le cadre d’un projet ciblé dans le laboratoire Autonomous Systems à Zurich, sous la direction du professeur Roland Siegwart. L’objectif d’un tel projet ciblé à la fin d’un cursus de bachelor consiste toujours à développer un prototype fonctionnel dans un délai de 9 mois. Une occasion pour les étudiants d’acquérir une précieuse expérience professionnelle : « Cela nous apporte beaucoup. Nous pouvons appliquer nos connaissances concrètement et agir simplement comme des ingénieurs » explique l’étudiant en construction mécanique Yves Haberthür, membre de l’équipe RoBoa qui compte 8 personnes*. Afin d’éviter que le robot ne génère de la friction et pour lui permettre de se déplacer sans problème sur un terrain difficile, une technique de retournement sophistiquée est mise en œuvre. L’université de Standford avait déjà entrepris des recherches dans ce sens. A l’intérieur d’un tuyau en nylon enduit, d’un diamètre de 101 mm, se trouve une structure appelée « robot interne ». Elle est composée de deux actionneurs pneumatiques, et elle est reliée à deux autres parties du RoBoa. D’une part à la tête où se trouvent des capteurs de température ainsi qu’une caméra, un microphone et un haut-parleur afin de pouvoir communiquer avec les victimes au moyen du robot. D’autre part à un boîtier stationnaire qui contient la base du tuyau, des câbles, des tuyaux pneumatiques et l’électronique.
Friction minimale entre le RoBoa et l’environnement
« Si nous augmentons la pression à l’intérieur du tuyau, le tuyau se retourne vers l’extérieur et le robot se déplace. L’avantage décisif est que nous avons réduit la friction au minimum. C’est grâce aux petits tuyaux d’alimentation qui se déplacent dans le tuyau plus grand. De plus, nous disposons d’une solution décentralisée. C’est-à-dire, il y a seulement un petit tuyau d’air pour l’avant et un câble Ethernet pour le courant et les données. Ensuite, le robot interne se charge de la répartition sur les segments » explique M. Haberthür. On évite ainsi que le robot reste coincé dans les gravats. C’était le contraire pour le projet précédent Proscobis : ce robot dépendait de câbles et tuyaux externes et les entraînait pour chaque segment, de sorte qu’il ne pouvait plus avancer au bout de quelques mètres. Un segment du RoBoa consiste en un actionneur et un îlot de vannes équipé de l’électronique associée. Pour chaque segment, le robot interne peut subir une courbure d’environ 90 degrés.
Chez item, c’est tout en un. Une offre globale avec une solution pour tous les cas de figure.
Pour le RoBoa, le tuyau est alimenté en air comprimé par le boîtier et peut atteindre une longueur maximale de 17 mètres. Grâce à sa faible largeur, on peut le faire passer par de petites ouvertures. La commande passe par une manette qui déclenche les mouvements latéraux de la tête. A la recherche de matériel pour la construction du boîtier mesurant 460 x 460 x 500 mm, l’équipe est tombée sur la technique des profilés d’item. En plus de la qualité du matériau pour la structure de cadre et les plaques tout autour, c’est l’impression globale qui a fait la différence : « Chez item, l’accueil est sympathique et aimable, et on nous a aidé volontiers. Et si on crée une construction avec item Engineeringtool, on reçoit tous les composants comme prévu. Chez item, c’est tout en un. C’est une offre globale avec une solution pour tous les cas de figure » souligne Y. Haberthür.
Un robot sismique fait ses preuves en public
Pendant le développement du robot, l’équipe RoBoa a coopéré avec les instances officielles des équipes de sauvetage de l’armée suisse et du centre suisse des drones et de la robotique. Le premier prototype du RoBoa fut donc présenté au public en juillet 2020 dans le cadre de l’événement ARCHE (Advanced Robotic Capabilities for Hazardous Environments). Cet événement annuel au centre de formation des équipes de sauvetage suisses à Wangen an der Aare prévoit les nombreuses utilisations possibles de la robotique en matière de gestion des catastrophes. A l’issue d’une présentation du projet, le robot sismique devait faire ses preuves dans la pratique : il fallait retrouver un membre de l’équipe caché sous les décombres – un défi que le RoBoa a su relever sans problème. Actuellement, l’équipe s’occupe du développement d’un deuxième prototype plus élaboré. En plus d’une alimentation en eau et d’une commande optimisée, avec marche arrière, il est également prévu de revoir le boîtier d’alimentation. Le deuxième prototype RoBoa sera présenta à l’ARCHE 2021.

* Les autres membres de l’équipe sont Samuel Sigrist, Patricia Hörmann, Pascal Auf der Maur, Alexander Kübler, Michael Lustenberger, Betim Djambazi et Oda Vigen.
Vous souhaitez être informé régulièrement sur les possibilités d’application des produits item ? Alors, ne cherchez plus : abonnez-vous au blog item en cliquant sur la case en haut à droite !

