
La collaboration parfaite avec un collègue artificiel n’est plus un rêve d’avenir.
L’une des innovations les plus marquantes en matière de numérisation et d’industrie 4.0 est la collaboration de travailleurs humains et de robots. Ce qui ressemblait à de la science-fiction il y a quelques années est maintenant bien avancé. Dans le même temps, l’avenir du travail soulève de nombreuses questions : comment fonctionne exactement la coordination des humains et des robots ? Dans quelle mesure l’industrie 4.0 et l’ergonomie peuvent-ils être harmonisés ? Henning Petruck est chercheur associé à l’institut d’ingénierie industrielle (Institut für Arbeitswissenschaft, IAW) de l’université technique RWTH d’Aix-la-Chapelle et est spécialisé dans la collaboration homme-machine. C’est une forme de coopération dans laquelle les personnes et les robots travaillent main dans la main sans barrière de protection. À l’aide d’un poste de travail spécialement conçu à partir du système de poste de travail item, le doctorant du pôle d’excellence DFG « Internet of Production » étudie comment le support robotique peut soulager les travailleurs lors de l’assemblage.
Travail ergonomique et flexible
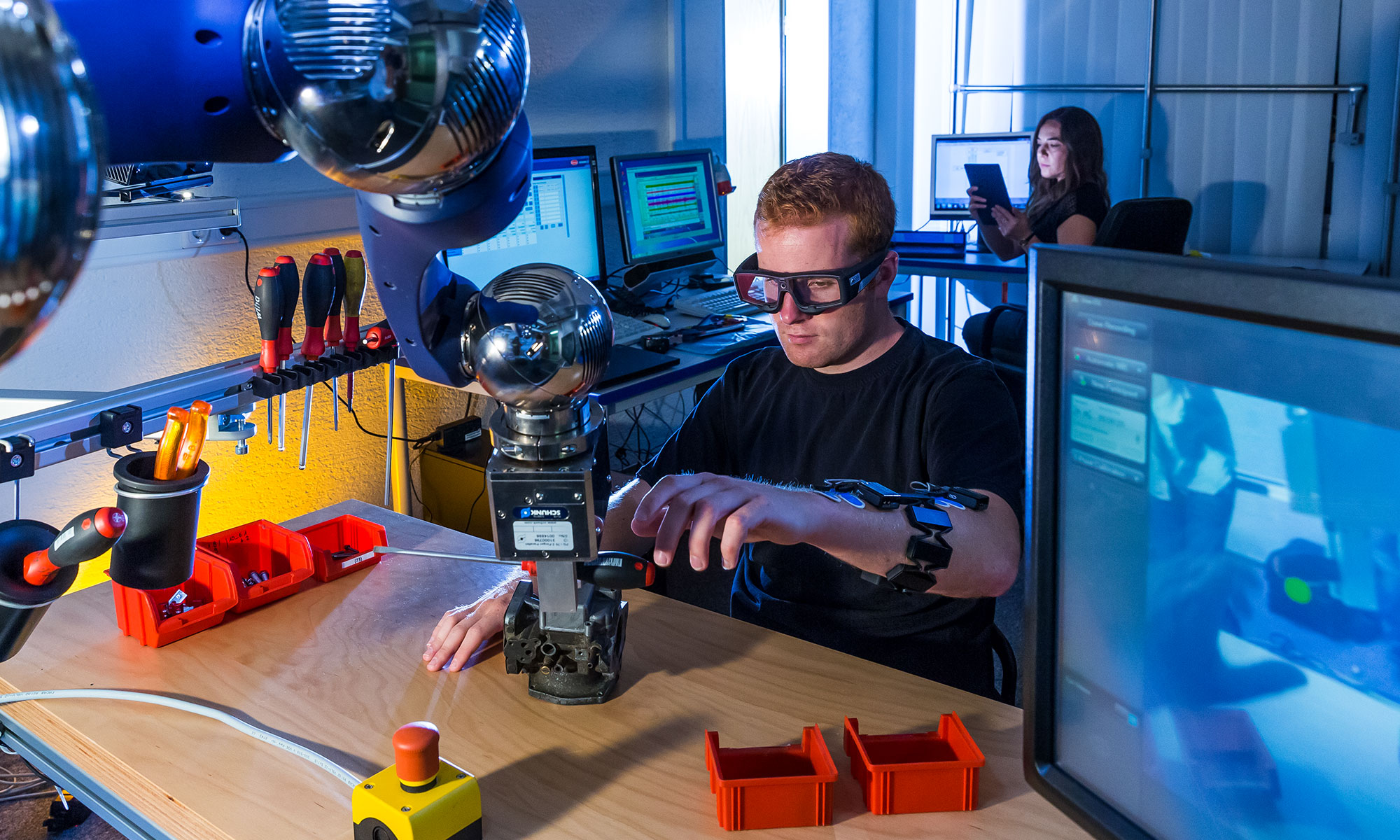
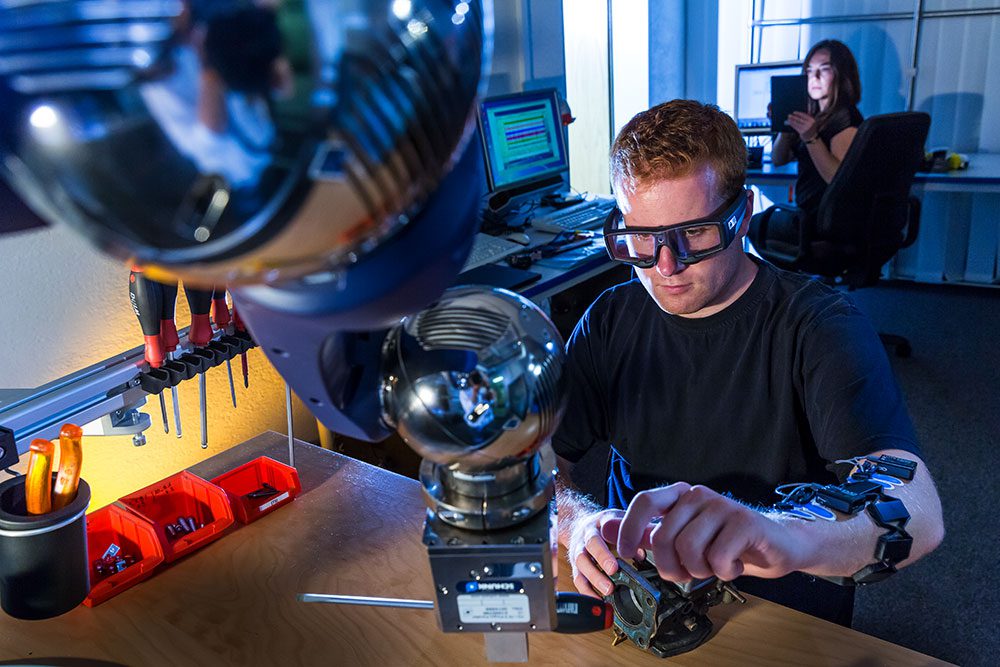
L’idée de base du poste de travail d’assemblage « Collaborative Workplace for Assembly » (CoWorkAs) est qu’un bras robotique mette à disposition du travailleur des composants et des outils. Il s’agit donc d’une collaboration homme-machine cent pour cent centrée sur le contact physique avec un robot. « Le travailleur peut se concentrer entièrement sur les éléments de la production à valeur ajoutée. Tout ce qu’il a à faire, c’est assembler les pièces. Il n’a plus rien à chercher », explique Henning Petruck. Cela est possible grâce à la structure suivante : Une structure de cadre à quatre colonnes relie une table de travail réglable en hauteur et l’alimentation en matériaux. Au-dessus, deux axes linéaires sont connectés au bras du robot.
Le concept d’item nous a séduit par sa fonction de réglage en hauteur, sa flexibilité et sa modularité.
À l’exception de ce bras, le poste de travail est entièrement constitué de solutions item. Cela inclut également des éléments supplémentaires tels que des porte-outils et des supports de moniteurs. Lors du choix du prestataire de services, le facteur ergonomie a naturellement joué un rôle déterminant pour les responsables de projet. « Nous avions abordé item lors d’une foire commerciale, puis un concept a été élaboré pour nous. Nous avons beaucoup aimé la fonction de réglage en hauteur, la flexibilité et la modularité », explique M. Petruck. Ainsi, l’ensemble du poste de travail est connecté et il peut être complètement ajusté à la taille individuelle du travailleur. De plus, il peut être étendu grâce à sa conception modulaire.

Collaboration homme-machine avec un timing parfait
Le bras robotique saisit le matériau et se dirige vers le travailleur. Plus il se rapproche de lui, plus il ralentit pour éviter les collisions indésirables. Ensuite, le robot s’arrête complètement devant son collègue humain. Ceci est également important pour le sentiment de confort de la personne. C’est elle qui effectue le geste pour saisir la pièce – et non l’inverse. « Pour le travailleur, la collaboration avec un robot est une toute nouvelle situation. Surtout si le robot a une grande amplitude de mouvement comme dans notre cas, ce qui signifie qu’il n’est pas installé de manière stationnaire. Cela peut causer une certaine incertitude. Il est important de prendre en compte ces facteurs », souligne M. Petruck.
L’algorithme peut calculer avec précision quand le travailleur a besoin de la pièce suivante.
Chaque collaboration homme-machine relève d’un défi technique décisif : comment prédire avec précision le comportement humain ? Dans le cas du CoWorkAs, les temps du travailleur sont analysés par la détection d’activité au cours du processus d’assemblage : quand a-t-il terminé son processus d’assemblage ? Après avoir observé le premier passage, un algorithme calcule la divergence entre le temps prévu et le temps réellement requis. « La durée de la prochaine étape d’assemblage peut être prédite avec précision sur la base de cet écart. C’est la base pour que le bras robotique atteigne le composant au bon moment », explique M. Petruck. S’il l’atteint trop tôt, le travailleur serait exposé à un stress inutile et le robot ne serait pas disponible pour d’autres tâches.

Protection des données et recherches futures
Les inquiétudes relatives à la protection des données ne sont pas fondées dans cette forme de collaboration homme-machine : les profils utilisateur enregistrés ne sont pas nécessaires. L’algorithme nécessite peu d’informations pour s’adapter à l’utilisateur. Le déroulement d’un processus suffit amplement. De plus, on souhaite prochainement étudier le contrôle humain du bras robotique. À ce propos, on peut évoquer les recherches d’un collègue de la RWTH d’Aix-la-Chapelle. Il a développé un système de contrôle pour les paraplégiques, qui peuvent seulement bouger la tête. Grâce à un capteur d’accélération monté sur la tête, ils peuvent ainsi contrôler un robot par les mouvements de leur tête. Ces essais seront poursuivis sur le CoWorkAs.
Vous trouverez des informations complémentaires dans le travail « Human-Robot Collaboration in Manual Assembly – A Collaborative Workplace », dans lequel ont également été impliqués trois experts en ergonomie d’item. Par ailleurs, le professeur Verena Nitsch, directrice de l’institut d’ingénierie industrielle de la RWTH d’Aix-la-Chapelle, et Henning Petruck se feront un plaisir de répondre à vos questions.