
Robot o zwiększonym promieniu roboczym – dzięki 7 osi: W ramach praktycznego projektu studenckiego powstał idealny zespół: składają się na niego podajnik, prowadnica liniowa i robot współpracujący.
Studia na uniwersytecie i gromadzenie cennych doświadczeń w firmie: Zwykła codzienność na tzw. studiach dualnych, gdzie nauka i praca idą ze sobą w parze. Jan Tollewski już od samego początku wiedział, że chce iść na takie studia. Tollewski, rodowity mieszkaniec Solingen, zwrócił się z tym pomysłem bezpośrednio do firmy item: „Znałem wówczas jedną osobę, która pracowała w item, i rozmawiałem z nią o firmie. Wszystko wyglądało bardzo korzystnie, dlatego szybko wiedziałem, że praktyczną część studiów chcę zaliczyć właśnie u nich.” Podczas rozmowy kwalifikacyjnej zdecydowałem się na uniwersytet w Bochum. To tam Jan studiuje na kampusie Velbert/Heiligenhaus na 4 roku mechatronikę i rozwój produktu (Bachelor of Engineering). Ten rodzaj studiów nazywany jest „kooperacyjnymi studiami inżynieryjnymi (niem. KIS)”. W trakcie semestru studenci dwa dni w tygodniu spędzają we współpracującej z uczelnią firmie a trzy na uczelni. Studia obejmują trzy projekty KIS, których celem jest zastosowanie poznanej teorii w praktyce. W ostatnim projekcie przed pracą licencjacką 27-letni Jan Tollewski połączył siły z innym studentem, który również pracuje w item: Julius Kuczkowiak studiuje elektrotechnikę na uniwersytecie Bonn-Rhein-Sieg. Po swojej praktyce semestralnej wrócił jako student do item. Obaj studenci wspólnie zrealizowali inspirujący projekt testowy pt. „Range Extender”: Centrum układu testowego stanowi robot z 7 osią, który podczas transportu odpowiedzialny jest za sortowanie ładunków.
![]()
Chcesz szukasz podobnych ozwiązań z zakresu robotyki?
Skorzystaj z jednego z naszych standardowych rozwiązań, dostosuj je lub zaprojektuj własne rozwiązanie w oparciu o naszą sprawdzoną technologię profili aluminiowych. Wesprzemy Cię w Twoim projekcie bezpośrednio lub za pośrednictwem naszej sieci kompetentnych partnerów item pluspartner. Zainspiruj się!
DOWIEDZ SIĘ WIĘCEJ
Łączenie obszarów produktowych i synchronizacja procesów roboczych
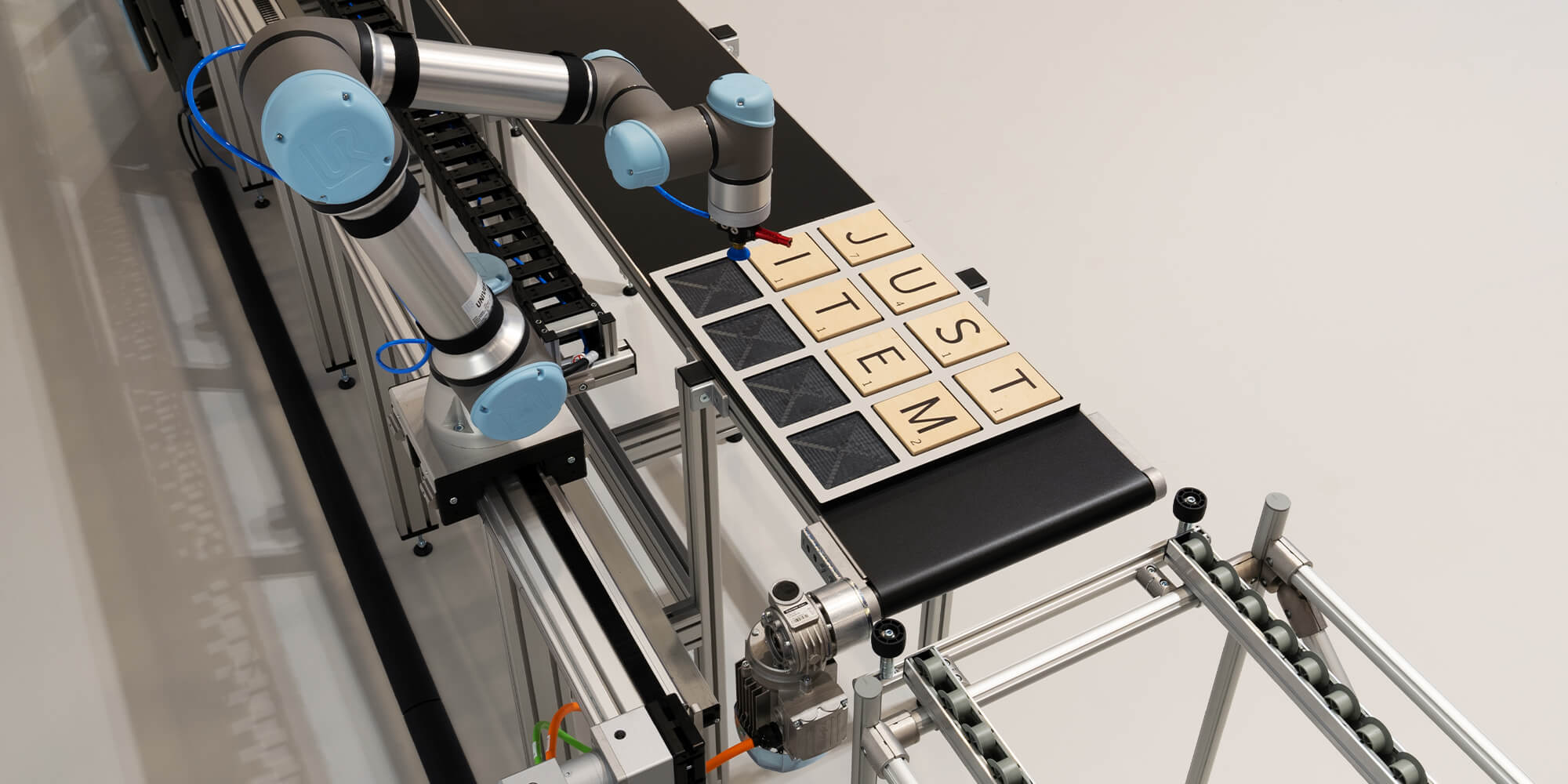
Zadanie trzeciego projektu KIS polegało na połączeniu ze sobą różnych obszarów produktowych. Idealny przykład to „Range Extender”. Nazwa projektu ma charakter programowy, ponieważ robot, który wyróżnia się specjalną konstrukcją, ma 7 oś, a tym samym większy promień roboczy: Równolegle do podajnika taśmowego wykonanego z elementów systemu podajników item o długości 6 m umieszczona jest oś liniowa z elementów systemu automatyzacji item. Na osi liniowej osadzony jest robot współpracujący. Do niego przylega konstrukcja z listwą rolkową wykonana w oparciu o system modułowy Lean Production. Wszystkie elementy udało się bez trudu ze sobą połączyć, ponieważ wszystkie części mechaniczne mają te same wymiary rowków, a także te same łączniki: „Sami założyliśmy, że chcemy użyć możliwie mało komponentów. Ponieważ podajniki wyposażone są w rowek systemowy, w łatwy sposób udało się nam wszystko zbudować i ze sobą połączyć. Modułowość produktów item jest po prostu niewiarygodna”, wyjaśnia Jan. Zadanie kobota polegało na tym, aby synchronicznie do ruchu podajnika ponownie posortować puzzle w pojemniku na obrabiane przedmioty. Następnie pojemnik przekazywany jest na listwę rolkową.
Istnieje możliwość wykorzystania innych modeli robotów współpracujących: w tym celu wystarczy jedynie wywiercić na płycie wózka prowadnicy liniowej o powierzchni 200 x 200 cm inne otwory.
Kolejną zaletą konstrukcji jest to, że nie wymaga użycia nadrzędnego układu sterowania. Serwosterowanie BL 1-04 C item łączy się bezpośrednio z danym kobotem. Dotychczas udało się zaimplementować następujące modele robotów: Universal Robots UR5, ABB CRB 15000 oraz Doosan A0509. Istnieje możliwość wykorzystania innych modeli robotów współpracujących: w tym celu wystarczy jedynie wywiercić na płycie wózka prowadnicy liniowej o powierzchni 200 x 200 cm inne otwory. Łącznie użyto jedynie dwóch komponentów, które nie znajdują się w ofercie item: czujnika przyrostowego i zapory świetlnej. Czujnik przyrostowy służy do pomiaru prędkości taśmy podajnika. Dane analizowane są za pomocą serwosterowania z funkcją przetwarzania sygnałów o wysokiej rozdzielczości, wyjaśnia Jan: „Załóżmy, że nagle na podajniku umieścimy ciężki ładunek, co sprawi, że taśma podajnika zwolni. Oś liniowa, po której porusza się robot, również automatycznie zwolni. Wówczas robot będzie poruszał się z mniejszą prędkością.” Proces uaktywnia się wtedy, gdy pojemnik przesunie się przez zaporę świetlną. Wówczas uruchamiają się oś liniowa i kobot, przy czym sygnał wyzwalający zapewnia absolutną pozycję synchronizującą.
Od latającej piły do robota z 7 osią
Inspiracją dla robota „Range Extender” był system nazywany „latającą piłą”, który pierwotnie używany był do obróbki drewna. W tym przypadku belkę lub pień drzewa docina się w trakcie transportu. Tzn., że transport materiałów i jednoczesna obróbka idą ze sobą w parze. Zabawowy charakter układania puzzli za pomocą robota z 7 osią nie powinien przysłonić wszechstronności tego rozwiązania: „W zasadzie nie ma tutaj żadnych ograniczeń. Można stworzyć coś na podobieństwo naszego systemu i uzupełnić to o np. moduł do kontroli optycznej. Innym możliwym zastosowaniem są procesy montażu i sklejania, nakładanie powłok wykończeniowych lub pakowanie elementów. Jestem w stanie wyobrazić sobie również łączenie pojedynczych elementów w jedną całość, np. przy użyciu kilku równolegle pracujących podajników”, dodaje Jan. Dzięki systemowej kompatybilności produktów item można realizować wszelkie pomysły, bez żadnych ograniczeń dla kreatywności. Nowe produkty, np. system modułowy do cobotów lub system podajników, można bez trudu łączyć z innymi komponentami. item od samego początku przywiązywało wagę do klasycznego i jednolitego designu wszystkich swoich produktów – dlatego komponenty wyglądają jakby stworzone z jednej bryły.
Jestem bardzo zadowolony: tutaj w item mogę poznać prawdziwe zawodowe życie od podszewki. A połączenie teorii z praktyką sprawdza się wyśmienicie.
W międzyczasie do Jana, który prawie już skończył swoje studia, dołączył od semestru zimowego 2021 kolejny student. Chociaż studiuje na innym kooperacyjnym kierunku studiów na uniwersytecie w Bochum, razem korzystają z wielu wspólnych kursów i szkoleń. Jan chętnie wspiera kolegę, dzieląc się swoim doświadczeniem zdobytym podczas studiów i pracy zawodowej. Jego praca w item polega przede wszystkim na realizacji mniejszych projektów i wspierania innych pracowników, których z resztą bardzo ceni i szanuje. Podczas ferii semestralnych, gdy w pracy jest 5 dni w tygodniu, ma oczywiście większe pole do manewru. O swoich studiach i pracy Jan mówi wyłącznie w superlatywach: „Jestem bardzo zadowolony: tutaj w item mogę poznać prawdziwe zawodowe życie od podszewki. A połączenie teorii z praktyką sprawdza się wyśmienicie. Podczas wykładów często stwierdzam: „O, a takie rozwiązanie widziałem już w item.” Innymi słowy: Na studiach udało mi się czasem zabłysnąć, ponieważ omawiane rzeczy robiłem już w item.”
Chcesz być na bieżąco informowany o wszystkich innowacyjnych systemach zrobotyzowanych? W takim razie mamy coś dla Ciebie: Zapisz się do blogowego newslettera item, wykorzystując do tego baner w prawym górnym rogu!

